|
| SlotGNN: Unsupervised Discovery of Multi-Object Representations and Visual Dynamics [ICRA'24] |
|
| KINet: Unsupervised Forward Models for Robotic Pushing Manipulation [RAL'23] |
|
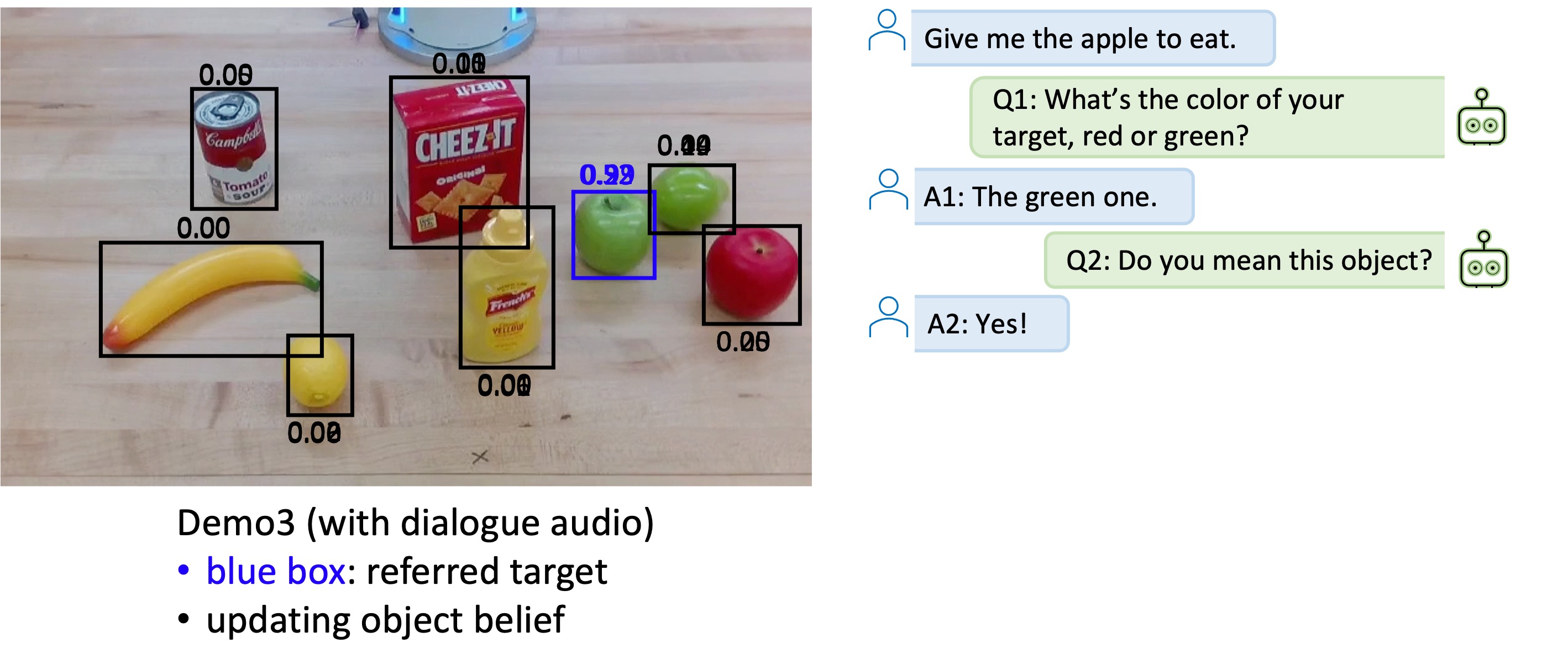
| Interactive Robotic Grasping with Attribute-Guided Disambiguation [ICRA'22] |
|
| Learning Object Relations with Graph Neural Networks for Target-Driven Grasping in Dense Clutter [ICRA'22] |
|
| Attribute-Based Robotic Grasping with One-Grasp Adaptation [ICRA'21] |
|
| Collision-Aware Target-Driven Object Grasping in Constrained Environments [ICRA'21] |
|
| Learning Visual Affordances with Target-Orientated Deep Q-Network to Grasp Objects by Harnessing Environmental Fixtures [ICRA'21] |
|
| A Deep Learning Approach to Grasping the Invisible [RA-L'20] |
|
| Learning to Generate 6-DoF Grasp Poses with Reachability Awareness [ICRA'20] |